

前回は主に超電導リニアの浮上、推進原理・構造についてお話をいたしました。しかしながら、実用までには様々な車両に関する技術を開発し、実験で確認しなければなりません。今回は車両に関する技術、特に超電導電磁石の技術を中心に、株式会社東芝の報告書をもとにお話を進めたいと思います。
(3)超電導リニアモーターカーの車両技術
山梨県の実験線を中心に20年以上行われてきた開発・実験は、様々な課題をクリアしなければなりませんでした。例えば、台車、超電導電磁石、永久電流スイッチ、パワーリード、冷却システム、車輪、ブレーキ、車上電源、車両位置検出、列車制御、軌道、トンネル建設等々です。
そして、この中でもリニア新幹線の成否を決める重要な技術のひとつが高性能・高効率な超電導電磁石の開発だったのです。
(3-1)低温超電導電磁石
下図は、山梨実験線用の超電導磁石の構造を示したものです。ニオブ-チタン線材をレーストラック型に巻いた超電導コイルは、ステンレス製の内槽と呼ばれる容器内部に収納され固定されます。これらは、常温のアルミニウム製の外槽と呼ばれる真空容器内に四つ納められ、低熱伝導性の荷重支持材で断熱支持される構造になっています。超電導コイルは,内槽に満たされる液体ヘリウムに浸漬され、極低温の4.2K(マイナス269℃)に冷却されます。
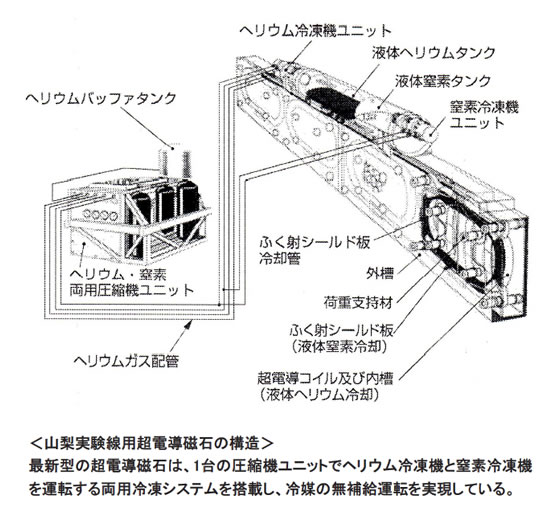
外槽と内槽の間には、内槽へ侵入するふく射熱を防止するために、液体窒素で冷却されるふく射シールド板を設けています。また,上部のタンク部には、液体ヘリウムを補給する液体ヘリウムタンク及び蒸発したヘリウムを再液化するためのヘリウム冷凍機が搭載されています。最新型の超電導磁石では、窒素冷凍機も搭載する両用冷凍システムを構成し、液体窒素の無補給化も達成しています。
最近の開発では、これまでメーカーごとに異なっていた構造仕様を統一するとともに、コスト低減を図った新型超電導磁石を共同開発しました。この新型超電導磁石(TS1、2)は、性能面でも従来の700kAから750kAに高起磁力化され、更に、地上コイルの簡素化につながる推進コイルの単層配置に対応した熱負荷や振動特性の向上を図っています。2002年11月から走行試験による耐久性の検証が行われています。ただし、2027年の実用車両では、高温超電導電磁石に代わる可能性があります。
(3-2)高温超電導電磁石
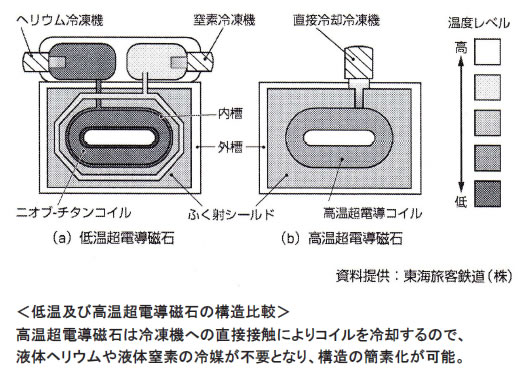
山梨実験線用低温超電導磁石と高温超電導磁石の構造比較を下図に示しました。
山梨実験線用低温超電導磁石は、コイルを超電導状態にするため液体ヘリウム及び液体窒素を使用していますが、高温超電導磁石は、コイルに高温超電導線材を使用して冷凍機による伝導冷却方式にすることで、液体ヘリウムや液体窒素の冷媒が不要になり、構造が簡素化され運用が容易になります。そこで、1999年から東海旅客鉄道(株)と東芝が共同で、超電導リニア用高温超電導磁石の開発に着手しました。
高温超電導線材にはビスマス-銀シース線材(Bi2223)を用い、伝導冷却により20K(マイナス253℃)以下に冷却します。永久電流モードでの低電流減衰を実現するため、ひずみに弱いビスマス-銀シース線材の微小電圧の発生を極力小さくするコイル巻線技術が開発されたほか、永久電流モード運用を可能とするイットリウム系薄膜を用いた熱式永久電流スイッチ、冷凍負荷を軽減する超音波モータ駆動の着脱電流リードなどの要素技術が開発されました。
これらの要素技術開発の成果を反映し、2001年から3年間をかけて,山梨実験線用超電導コイルと同じ大きさの高温超電導コイルを1個収納した高温超電導磁石が開発されました。この高温超電導磁石を20K以下に冷却して評価試験を行った結果,起磁力750kA,コイル中心磁場1.5T以上が得られることが証明され、さらに電磁加振試験などでの耐振性能が十分であることが確認されて、過酷な使用なお、この高温超電導磁石を4個のコイルにして、愛・地球博の“JR 東海超電導リニア館”において、6か月の会期中に問題なく運転できたことで、長時間の励磁や毎日の励消磁及び繰り返し行われる発射時の振動印加に対し、高信頼性と高安定性能が実証されました。
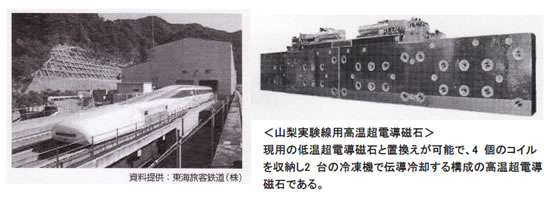
以後、この高温超電導磁石は,山梨実験線の3両編成列車の先頭車両に搭載され(下図)、2005年11月22日~12月9日に実施された走行試験において、超電導磁石の安定した励磁状態(平均1%/日前後の電流減衰)が確認され、最高速度553.9km/hを記録しました。また、コイルの温度は走行試験条件にかかわらず安定しており、常に20K以下の温度レベルに冷却されていたことが確認されています。その後の走行試験期間中に延べ走行距離4,111kmを達成するなど多くの成果が得られました。
現在の実験線ではまだ、低温超電導磁石が使われているようですが、2027年の実用車両では、高温超電導磁石が使われる可能性が高いと思われます。
(3-3)一体型地上コイル
地上コイルはガイドウェイ全線にわたって敷設されるため,超電導リニアの建設コストや運用コストへの影響も大きく、その製造コストの低減及び保守性の向上は非常に重要な課題です。
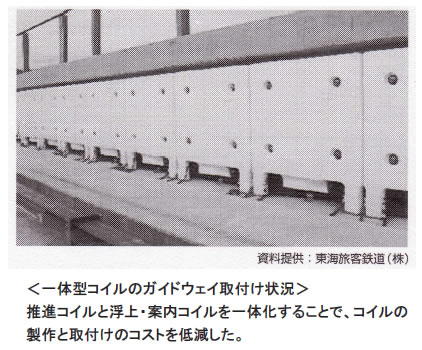
現在二層構造となっている推進コイルを単層構造とすることにより小型・単一化し、更に、推進コイルと浮上・案内コイルを一体化することで、コイルの製作と取付けのコストを低減した一体型地上コイルを開発しました。一体型コイルとすることで、従来タイプの地上コイルに比べ、コイルの総数を1/2に減らすことができます。2002年度には、コスト低減のために開発された新型ガイドウェイにこのコイルを取り付けて山梨実験線に導入し、現在も評価試験を継続しています(下図)。
(3-4)永久電流スイッチ
永久電流スイッチとは、超電導コイルに流れる永久電流の開閉を行う装置です。超電導リニアの超電導電磁石コイルには熱式の永久電流スイッチが採用されています。熱式永久電流スイッチとはコイルの一部を暖めて超電導状態を解除することで永久電流を遮断する方式のことです。
(3-5)パワーリード
超電導コイルを励磁するには外部から電流を流す必要がありますが、その際に超電導コイルと接続する部分がパワーリードです。極低温状態のコイルと外界とを接続するため熱進入路となってしまうので、短時間でコイルに電流を流す必要があります。銅線で出来たパワーリードは超電導磁石に熱が伝わる要因となる為、 熱伝導性の低い高温超電導体を使用したパワーリードの開発も進められています。
(3-6)補助支持車輪・案内車輪
超電導リニアで採用されている誘導反発方式の欠点として、車両が低速時には十分な磁気浮上力が得られないこと、また磁気抗力を回避するため低速域では敢えて車輪走行することになります。このため低速時(約150km/h以下)の走行速度の時には補助支持車輪と案内車輪を出して走行を行います。車輪にはラジアル構造のゴムタイヤが使用されています。補助車輪は十分な磁気浮上力が得られた時(約150km/h以上)、車両本体内に格納されています。車輪の支持脚は、ダンパ機能を持ち、また非磁性で軽量・強度のあるチタン合金などが使用されています。さらには補助車輪のバックアップとして外接輪と呼ばれるアルミディスクが備え付けられています。
ゴムタイヤは、高速走行中の磁気浮上力の消失に備え、550km/hで走行中の状態から着地できる性能を持っていて、ブリヂストンが戦闘機のタイヤを基に開発しました。
(3-7)ブレーキ
通常運行時は、リニアモータを発電機として運動エネルギーから電気エネルギーに変換する回生ブレーキが使用されます。また回生ブレーキが故障した場合に備え、地上コイルを短絡させて制動力を得る発電ブレーキも用意されています。さらに500km/hからの緊急停止や回生ブレーキや発電ブレーキが不能となった場合でも制動力を確保するために以下の3系統のブレーキ装置が車両側に用意されています。
空力ブレーキ
空気断面を大きくすることで空気抵抗を増して停止させるブレーキ。MLU001に対して1989年(平成元年)に空力ブレーキの取り付け改造が行われ、山梨実験線車両のMLX01でも採用されています。
ディスクブレーキ
補助支持車輪に取り付けられたディスクをパッドで挟んで停止させるブレーキ。自動車等でも用いられている方式。500km/hからの停止にも耐えられるようにディスクには炭素複合材が使用されています。
接地ブレーキ
走行時に補助支持車輪が故障したり、急激に超電導電磁石の磁界が失われたなどの緊急事態の発生を想定し、車体に取り付けたブレーキシューを軌道の走行面に押し付けて停止させます。
(3-8)車上電源
超電導リニアは地上一次式であるため、車両推進に関わる電力は車両側で持つ必要はありませんが、車載超電導磁石の冷却器、その他の制御や室内の照明・空調等に使用するための電力は当然必要となります。今まで、ニッケル・カドミウム形の蓄電池や誘導集電装置による非接触給電、ガスタービンよる発電などが試されました。営業線では誘導集電による方法が採用されるものと考えられます。
(3-9)車両位置検知
超電導リニアはリニア同期モータであるため、軌道側の推進コイルの磁極を切り替えるには正確な車両位置検知が必要となります。宮崎実験線では、車両から浮上コイルをカウントして位置検知を行っていましたが、山梨の実験線では交差誘導線方式による車両検知が行われています。
交差誘導線方式とは、車両側に発信機を設置し、ここから一定周波数の信号を送ります。軌道側には、一定周期で開口したループを持ち、ループの巻き方向をループ毎に反転させたアンテナ線を軌道に沿って用意します。このアンテナ線はループの開口位置を少しずつずらし6本重ねてあります。
6本のアンテナは車両側から受信した信号を受信し、この信号を合成して正弦波を構成します。この正弦波を軌道側の推進コイルと同期するように配置することで同期モータ用の位置検知として使用しています。また正弦波の数をカウントすれば、列車の絶対位置も検知できます。その精度は数cmレベルとなります。
(3-10)列車制御
超電導リニアの場合、軌道側に設置されたコイルで車両の運転制御が行われる同期モーターの地上一次方式です。このため、列車の運転はすべて地上から行われます。同期モータのため正確な車両位置検知が必要となります。
また電力変換装置(変電所)ごとに閉塞区間を設定し、1変電所1閉塞1列車による運転を行います。これらは従来の鉄道システムと大きく異なる点です。列車制御は、運行管理システム、駆動制御システム、保安制御システムにより行われます。
以上で2回にわたり、“リニア中央新幹線の技術”について、特別企画としてお話をさせていただきました。磁力を存分に利用する“未来の乗り物”は、磁石の技術者、磁石応用製品の技術者・発明家の皆様だけでなく、小学生から大学生の学生さんにとっても、これからさらに大きな夢を与えてくれる技術分野になりそうです。
<参考・引用資料>
「超高速輸送システムを目指す超電導リニアモーターカー技術」 東芝レビューVol.61 No.9(2006)
フリー百科事典・ウィキペディア「リニアモーターカー」、「超電導リニア」
「トコトンやさしい磁石の本」 山田正光著 日刊工業新聞社)